Robotik & Scheduling
Master Thesis: Energie-bewusstes Task-Scheduling
Diskrete-Event-Simulation zur Bewertung von Scheduling-Strategien für einen autonomen Service-Roboter unter Berücksichtigung des Energiemanagements.
- Rolle
- Masterarbeit (MSE)
- Zeitraum
- 2024 bis 2025
- ROS2
- C++
- Discrete Event Simulation
- Behaviour Trees
- PostGIS
Kontext
Ein autonomer Service-Roboter an der FHNW soll Aufgaben erledigen, etwa Personen empfangen, begleiten, Gespräche führen und suchen, und dabei mit einem begrenzten Energiebudget auskommen. Er muss also rechtzeitig zur Ladestation zurückkehren. Welche Scheduling-Strategie hält den Betrieb dabei am besten aufrecht? Um das zu beantworten, ohne unzählige Stunden auf echter Hardware zu testen, habe ich eine Simulation gebaut.
Ziel
Verschiedene Scheduling-Strategien für den Roboter unter realistischen, zufällig erzeugten Einsätzen vergleichbar machen, mit dem Energiezustand und dem Laden als zentralem Faktor.
Ansatz & Architektur
Der Kern ist eine Diskrete-Event-Simulation: eine zeitlich sortierte Event-Queue treibt
den Ablauf, ein SimulationContext koordiniert Ereignisse, Roboterzustand und Scheduler. Der
Roboter selbst wird über einen Behaviour Tree gesteuert (Leerlauf, Suchen, Begleiten,
Laden, Gespräch, Missionssteuerung). Einsätze wie Personen-Ankünfte, Gespräche und
Begleitanfragen werden stochastisch erzeugt, ein Batteriemodell simuliert Verbrauch, Laden
und die Entscheidung zur Rückkehr an die Ladestation.
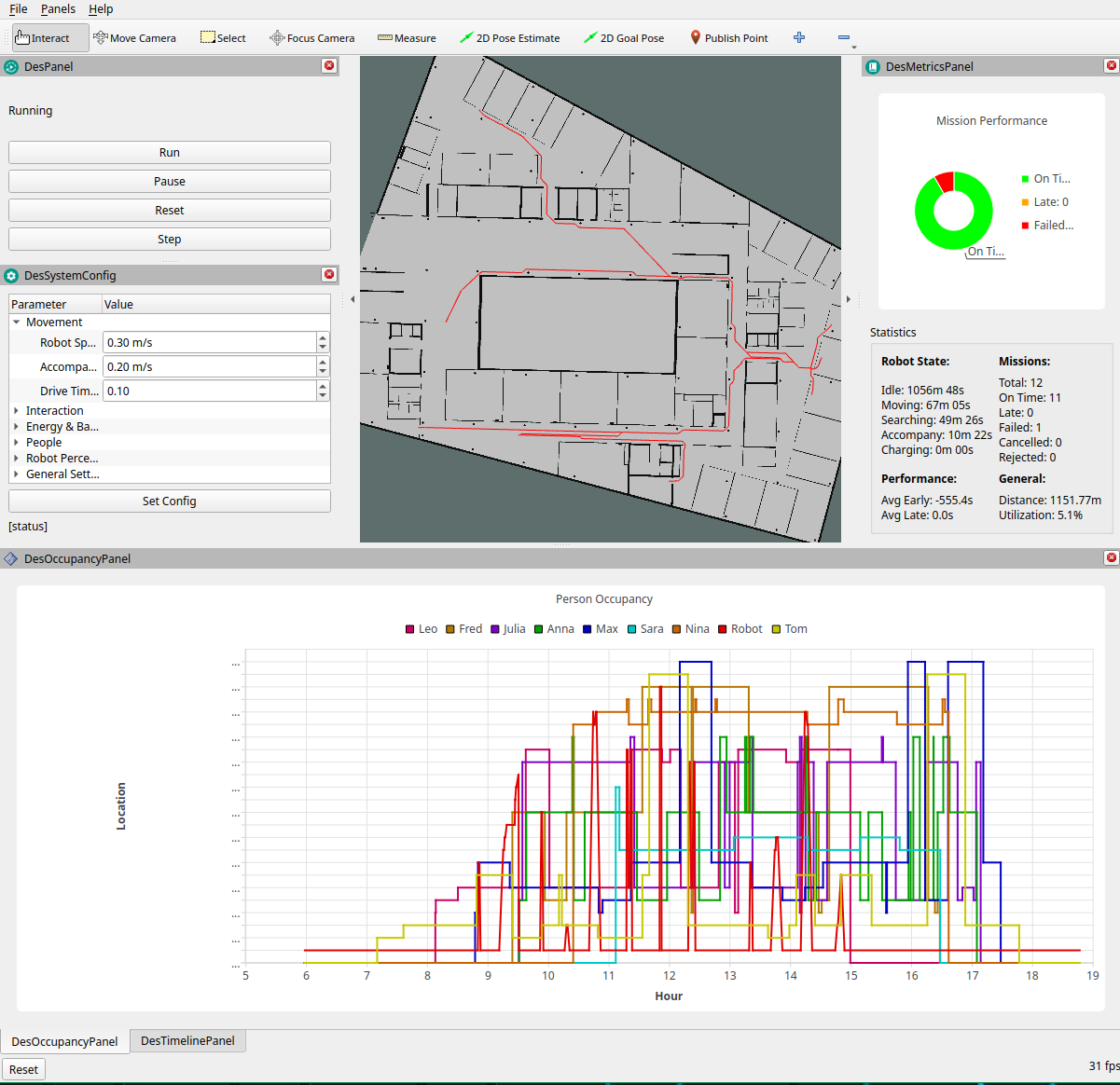
Umgesetzt ist das Ganze als ROS 2-System (Jazzy, C++). Es läuft entweder headless für Batch-Experimente oder interaktiv mit eigenen RViz-Panels zum Starten, Konfigurieren und Auswerten der Simulation. Karten- und Wegpunktdaten kommen aus einer PostGIS-Datenbank, die Gebäudegeometrie ist in Blender modelliert.
Herausforderungen
Die Simulation muss realistisch genug sein, um aussagekräftige Vergleiche zu liefern: stochastische Einsätze, ein glaubwürdiges Energiemodell und ein Roboterverhalten, das dem echten System nahekommt. Gleichzeitig soll sie schnell genug viele Durchläufe rechnen, um Strategien statistisch bewerten zu können.
Ergebnis
Ein ROS-2-Simulator, der Scheduling-Strategien für den autonomen Roboter unter Energie-Nebenbedingungen vergleichbar macht, inklusive Live-Metriken und RViz-Panels zur Auswertung. Der Code ist auf GitHub verfügbar.